여기에선, 직렬기구의 기본요소인 축 유닛의 구성요소와 그 제어형태에 대하여 설명한다. 먼저, 축유닛의 주요 구성요소인 모터, 안내기구(가이드), 구동기구, 위치검출기에 대하여 설명하고, 다음으로 축유닛의 제어형태를 시스템 전체의 구성과 함께 설명하고자 한다.
1.3.1 모터
제어 액츄에이터에는, 유압, 공압, 압전, 전동식이 있지만, 정밀한 위치결정 및 이송에서는 전동식 액츄에이터인 모터의 사용이 주류이다. Fig. 1.7 에 제어축에 일반적으로 사용되는 모터의 분류를 나타낸다.
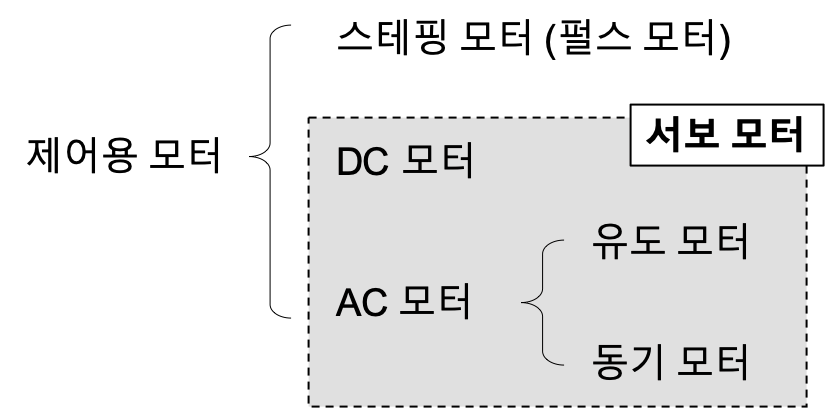
스테핑 모터는 펄스 모터라고도 불리며, 각도검출센서가 필요없기에, 간단한 장치에 널리 이용된다. 또한, 최근에는 고정밀화에도 진전이 있다.
서보모터 (servo motor) 란, 서보기구의 액츄에이터로 필요한 특성을 가지는 모터를 총칭한다. 급격한 가속도를 낼 수 있을 것, 이것에 필요한 큰 시동/정지 토크를 발생시킬 수 있을 것, 회전속도가 안정할 것 등이 서보모터의 특징이라 할 수 있다. 서보모터는 토크발생원리의 차이에서, AC (교류) 서보모터와 DC (직류) 서보모터로 분류되고, AC 서보모터는 제어방싱의 차이에 따라 동기모터와 유도모터로 분류된다. 유도모터는, 공작기계의 주축과 같이, 고속 및 높은 토크가 필요한 회전제어에 이용되고, 동기모터는 여기에서 말하는 위치결정 및 이송제어에 이용된다. 또한, 모터는 운동형태에 따라 회전모터와 직동모터로 분류되어, 회전모터는 그냥 모터, 직동모터는 리니어모터라 불린다.
1.3.2 안내기구 (가이드)
안내기구 (guideway) 는, 피구동체의 제어축방향 이외의 자유도를 구속하게 된다. 직동안내는, Fig. 1.8 에 나타내는 것처럼 이송방향에 대한 롤 (roll), 피치 (pitch), 요(yaw) 의 자세와 이송에 수직한 방향의 병진변위를 구속한다. 이러한 자유도는 정적인 운동오차의 원인이 되기에, 안내기구를 적절히 선정하는 것이 중요하다.
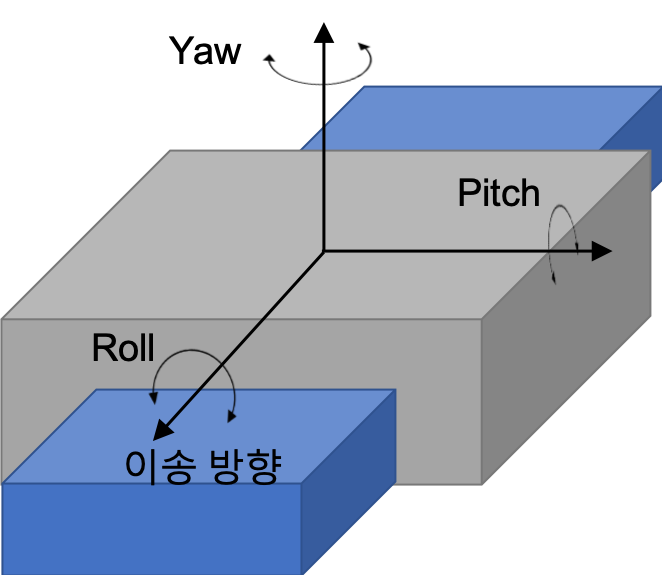
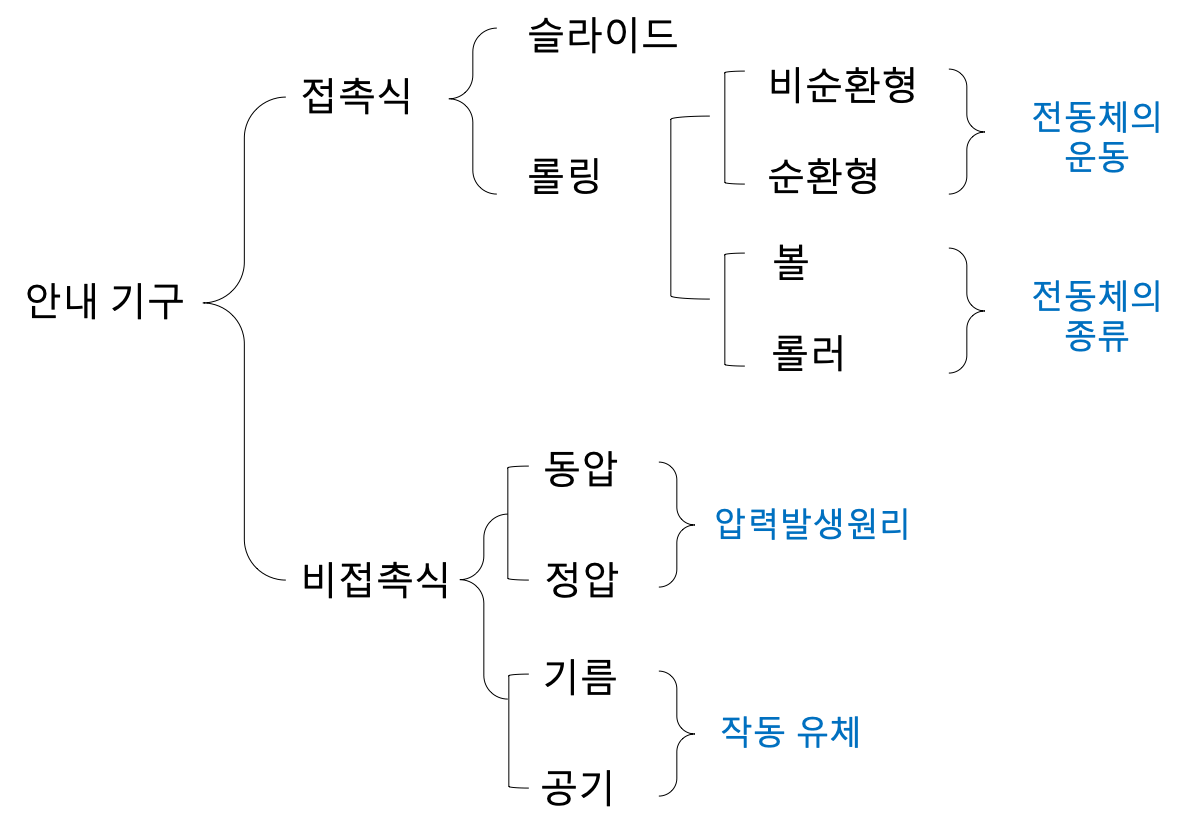
Fig. 1.9 에 안내기구의 분류를 나타낸다. 슬라이드 안내 (friction guideway)는 예로부터 이용되어 왔으며, 감쇠성, 자세의 안정성이 우수하지만, 마찰이 크기때문에 고속화가 어렵다. 이에 반해, 롤링 안내 (rolling guideway)는 볼 혹은 롤러와 같은 전동체를 사이에 두어서 피구동체를 안내가 가능해, 저마찰의 고속 이송에 적합하다. 롤링 안내는 전동체의 순환방식에 따라 분류 되기도 한다.
순환형 롤링 안내의 대표예인 리니어 가이드는 취급하기 쉽고, 위치 결정 및 이송에 널리 이용되고 있다. 롤링 안내에는, 전동체가 안내궤도를 통과 할때 전동체직경의 2배 만큼의 주기를 가지는 진동이 발생하는 성질을 가진다. 또한 궤도의 비틀림 정도에 따라서도 진동이 발생하고, 이러한 진동은 직진도와 자세오차에 영향을 미친다. 이로 인하여, 정도 높은 이송 운동이 필요한 경우에는, 비접촉식의 공기정압 안내 및 유정압 안내가 사용되지만, 이러한 안내는 작동유체를 사이에 둔 슬라이드 안내로 분류되기도 한다.
'제어공학' 카테고리의 다른 글
| [NC] 1.5 위치 결정 분해능 / 위치 결정 정도 (0) | 2020.05.14 |
|---|---|
| [NC] 1.4 제어계의 구성 (0) | 2020.05.06 |
| [NC] 1.3.4 위치 검출기 (광학식 엔코더) (0) | 2020.05.05 |
| [NC] 1.3.3 구동 기구 (0) | 2020.05.05 |
| [NC] 1장_ 위치결정 및 이송계의 기초 (1.1 & 1.2) (0) | 2020.03.02 |




댓글